 |
TORCS
1.3.9
The Open Racing Car Simulator
|


|
|
TORCS
1.3.9
The Open Racing Car Simulator
|
|
#include <stdlib.h>#include <stdio.h>#include <telemetry.h>#include <robottools.h>#include <tgf.h>#include <portability.h>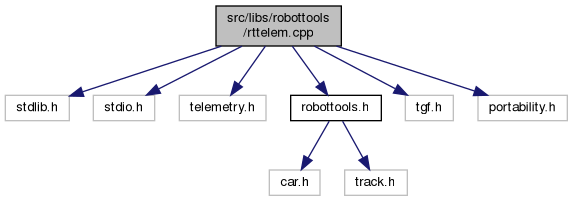
Go to the source code of this file.
Functions | |
| void | RtTelemInit (tdble ymin, tdble ymax) |
| Initialization of a telemetry session. More... | |
| void | RtTelemNewChannel (const char *name, tdble *var, tdble min, tdble max) |
| Create a new telemetry channel. More... | |
| void | RtTelemStartMonitoring (const char *filename) |
| Start recording into a file. More... | |
| void | RtTelemStopMonitoring (void) |
| Stop recording and close the file. More... | |
| void | RtTelemUpdate (double time) |
| Record a new set of values. More... | |
| void | RtTelemShutdown (void) |
| Deinstall the telemetry module. More... | |
Initialization of a telemetry session.
| ymin | Minimum value for Y. |
| ymax | Maximum value for Y. |
Definition at line 59 of file rttelem.cpp.
Create a new telemetry channel.
| name | Name of the channel. |
| var | Address of the variable to monitor. |
| min | Minimum value of this variable. |
| max | Maximum value of this variable. |
Definition at line 86 of file rttelem.cpp.
| void RtTelemShutdown | ( | void | ) |
Deinstall the telemetry module.
Definition at line 132 of file rttelem.cpp.

| void RtTelemStartMonitoring | ( | const char * | filename | ) |
Start recording into a file.
| filename | name of the file to use. |
Definition at line 98 of file rttelem.cpp.
| void RtTelemStopMonitoring | ( | void | ) |
| void RtTelemUpdate | ( | double | time | ) |
Record a new set of values.
| time | current time. |
Definition at line 121 of file rttelem.cpp.
 1.8.14
1.8.14