|
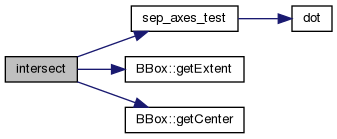
| bool | sep_axes_test (const Vector &a, const Vector &b, const Matrix &abs_b2a, const Vector &pos_b2a, const Matrix &abs_a2b, const Vector &pos_a2b) |
| |
| bool | intersect (const BBox &a, const BBox &b, const Transform &b2a, const Matrix &abs_b2a, const Transform &a2b, const Matrix &abs_a2b) |
| |
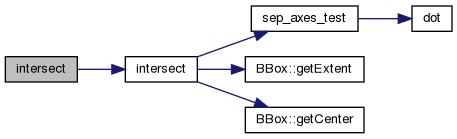
| bool | intersect (const BBoxNode *tree, const Convex &c, const BBox &bb, const Transform &b2a, Vector &v) |
| |
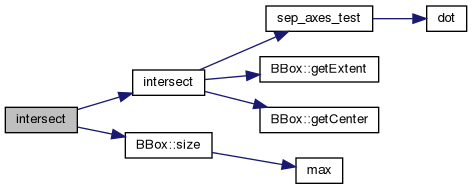
| bool | intersect (const BBoxNode *a, const BBoxNode *b, const Transform &b2a, const Matrix &abs_b2a, const Transform &a2b, const Matrix &abs_a2b, Vector &v) |
| |
| bool | find_prim (const BBoxNode *tree, const Convex &c, const BBox &bb, const Transform &b2a, Vector &v, ShapePtr &p) |
| |
| bool | find_prim (const BBoxNode *a, const BBoxNode *b, const Transform &b2a, const Matrix &abs_b2a, const Transform &a2b, const Matrix &abs_a2b, Vector &v, ShapePtr &pa, ShapePtr &pb) |
| |
| bool | common_point (const BBoxNode *tree, const Convex &c, const BBox &bb, const Transform &b2a, Vector &v, Point &pa, Point &pb) |
| |
| bool | common_point (const BBoxNode *a, const BBoxNode *b, const Transform &b2a, const Matrix &abs_b2a, const Transform &a2b, const Matrix &abs_a2b, Vector &v, Point &pa, Point &pb) |
| |



 1.8.14
1.8.14