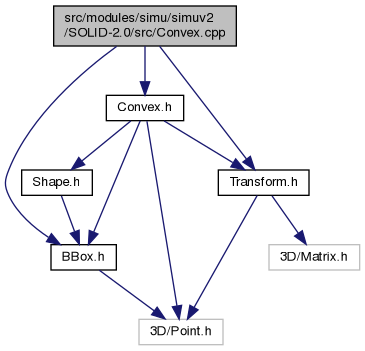
#include "Convex.h"
#include "BBox.h"
#include "Transform.h"
Go to the source code of this file.
|
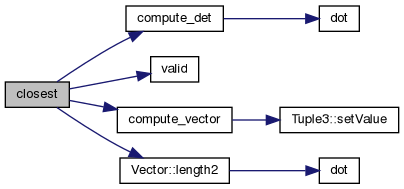
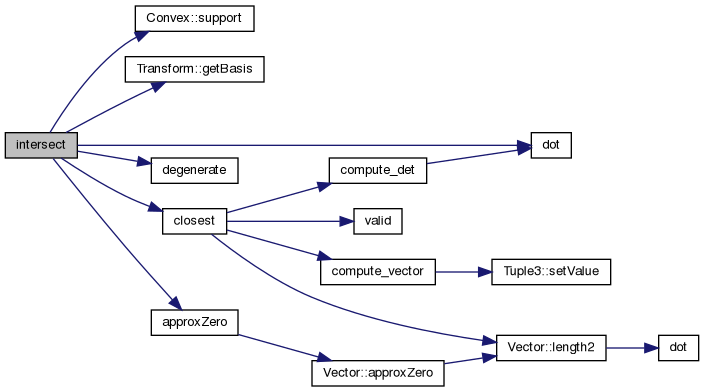
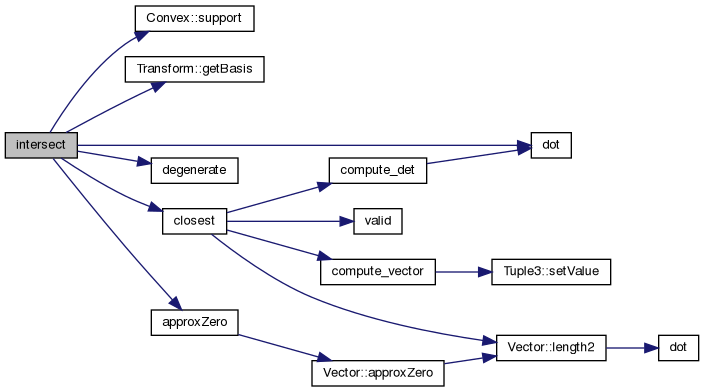
| void | compute_det () |
| |
| bool | valid (int s) |
| |
| void | compute_vector (int bits, Vector &v) |
| |
| void | compute_points (int bits, Point &p1, Point &p2) |
| |
| bool | closest (Vector &v) |
| |
| bool | degenerate (const Vector &w) |
| |
| bool | intersect (const Convex &a, const Convex &b, const Transform &a2w, const Transform &b2w, Vector &v) |
| |
| bool | intersect (const Convex &a, const Convex &b, const Transform &b2a, Vector &v) |
| |
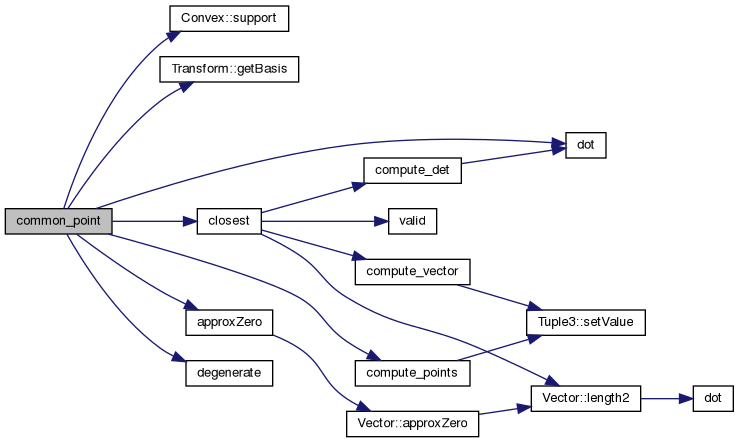
| bool | common_point (const Convex &a, const Convex &b, const Transform &a2w, const Transform &b2w, Vector &v, Point &pa, Point &pb) |
| |
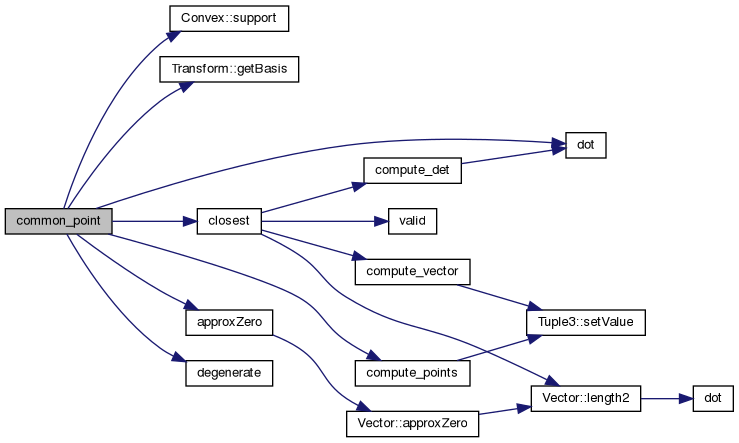
| bool | common_point (const Convex &a, const Convex &b, const Transform &b2a, Vector &v, Point &pa, Point &pb) |
| |
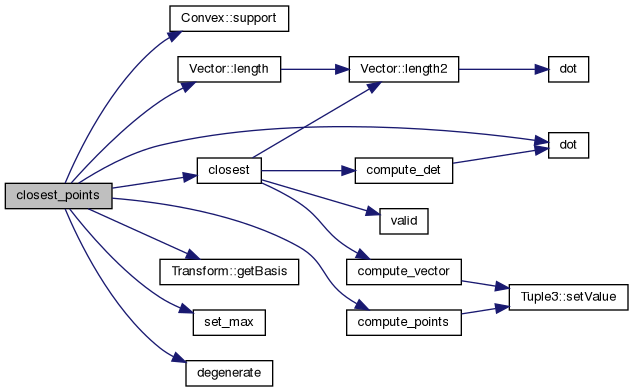
| void | closest_points (const Convex &a, const Convex &b, const Transform &a2w, const Transform &b2w, Point &pa, Point &pb) |
| |
◆ closest()
◆ closest_points()
◆ common_point() [1/2]
◆ common_point() [2/2]
◆ compute_det()
◆ compute_points()
| void compute_points |
( |
int |
bits, |
|
|
Point & |
p1, |
|
|
Point & |
p2 |
|
) |
| |
|
inline |
◆ compute_vector()
| void compute_vector |
( |
int |
bits, |
|
|
Vector & |
v |
|
) |
| |
|
inline |
◆ degenerate()
| bool degenerate |
( |
const Vector & |
w | ) |
|
|
inline |
◆ intersect() [1/2]
◆ intersect() [2/2]
◆ valid()
◆ abs_error
◆ all_bits
◆ bits
◆ det
◆ last
◆ last_bit
◆ rel_error



 1.8.14
1.8.14