#include <Quaternion.h>
|
| | Quaternion () |
| |
| | Quaternion (const float v[4]) |
| |
| | Quaternion (const double v[4]) |
| |
| | Quaternion (Scalar x, Scalar y, Scalar z, Scalar w) |
| |
| | Quaternion (const Vector &axis, Scalar angle) |
| |
| | Quaternion (Scalar yaw, Scalar pitch, Scalar roll) |
| |
| void | setRotation (const Vector &axis, Scalar angle) |
| |
| void | setEuler (Scalar yaw, Scalar pitch, Scalar roll) |
| |
| Quaternion & | operator+= (const Quaternion &q) |
| |
| Quaternion & | operator-= (const Quaternion &q) |
| |
| Quaternion & | operator*= (const Quaternion &q) |
| |
| Quaternion & | operator*= (Scalar s) |
| |
| Quaternion & | operator/= (Scalar s) |
| |
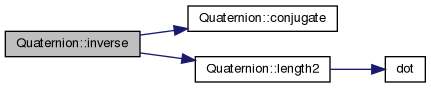
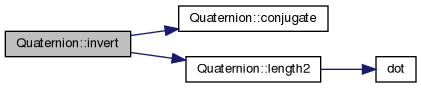
| Scalar | length2 () const |
| |
| Scalar | length () const |
| |
| bool | approxZero () const |
| |
| void | normalize () |
| |
| Quaternion | normalized () const |
| |
| void | conjugate () |
| |
| Quaternion | conjugate () const |
| |
| void | invert () |
| |
| Quaternion | inverse () const |
| |
| | Tuple4 () |
| |
| | Tuple4 (const float v[4]) |
| |
| | Tuple4 (const double v[4]) |
| |
| | Tuple4 (Scalar x, Scalar y, Scalar z, Scalar w) |
| |
| Scalar & | operator[] (int i) |
| |
| const Scalar & | operator[] (int i) const |
| |
| Scalar * | getValue () |
| |
| const Scalar * | getValue () const |
| |
| void | setValue (const float v[4]) |
| |
| void | setValue (const double v[4]) |
| |
| void | setValue (Scalar x, Scalar y, Scalar z, Scalar w) |
| |
Definition at line 33 of file Quaternion.h.
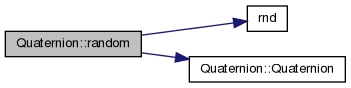
◆ Quaternion() [1/6]
| Quaternion::Quaternion |
( |
| ) |
|
|
inline |
◆ Quaternion() [2/6]
| Quaternion::Quaternion |
( |
const float |
v[4] | ) |
|
|
inline |
◆ Quaternion() [3/6]
| Quaternion::Quaternion |
( |
const double |
v[4] | ) |
|
|
inline |
◆ Quaternion() [4/6]
◆ Quaternion() [5/6]
| Quaternion::Quaternion |
( |
const Vector & |
axis, |
|
|
Scalar |
angle |
|
) |
| |
|
inline |
◆ Quaternion() [6/6]
◆ approxZero()
| bool Quaternion::approxZero |
( |
| ) |
const |
|
inline |
◆ conjugate() [1/2]
| void Quaternion::conjugate |
( |
| ) |
|
|
inline |
◆ conjugate() [2/2]
◆ inverse()
◆ invert()
| void Quaternion::invert |
( |
| ) |
|
|
inline |
◆ length()
| Scalar Quaternion::length |
( |
| ) |
const |
|
inline |
◆ length2()
| Scalar Quaternion::length2 |
( |
| ) |
const |
|
inline |
◆ normalize()
| void Quaternion::normalize |
( |
void |
| ) |
|
|
inline |
◆ normalized()
◆ operator*=() [1/2]
◆ operator*=() [2/2]
◆ operator+=()
◆ operator-=()
◆ operator/=()
◆ random()
◆ setEuler()
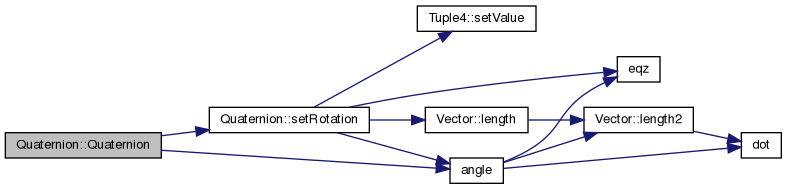
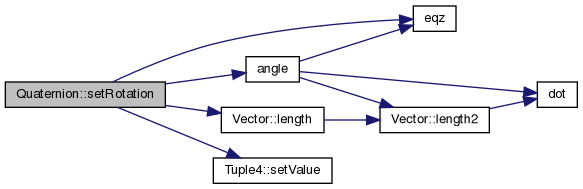
◆ setRotation()
| void Quaternion::setRotation |
( |
const Vector & |
axis, |
|
|
Scalar |
angle |
|
) |
| |
|
inline |
The documentation for this class was generated from the following file:




 Protected Attributes inherited from Tuple4
Protected Attributes inherited from Tuple4 1.8.14
1.8.14