|
TORCS
1.3.9
The Open Racing Car Simulator
|


|
|
TORCS
1.3.9
The Open Racing Car Simulator
|
|

Go to the source code of this file.
Classes | |
| class | Convex |
Functions | |
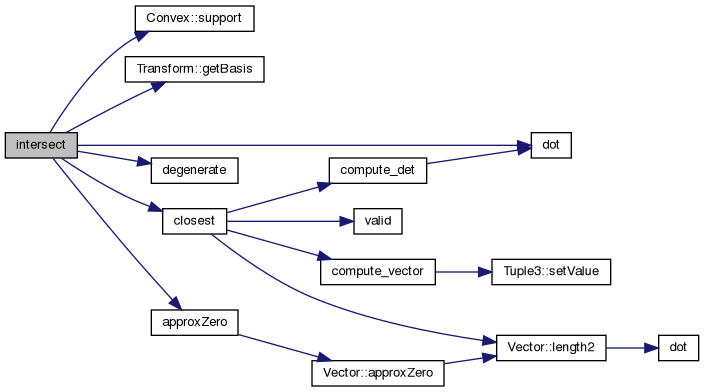
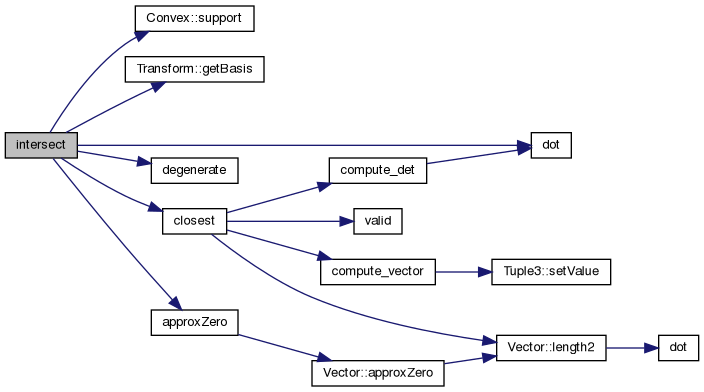
| bool | intersect (const Convex &a, const Convex &b, const Transform &a2w, const Transform &b2w, Vector &v) |
| bool | intersect (const Convex &a, const Convex &b, const Transform &b2a, Vector &v) |
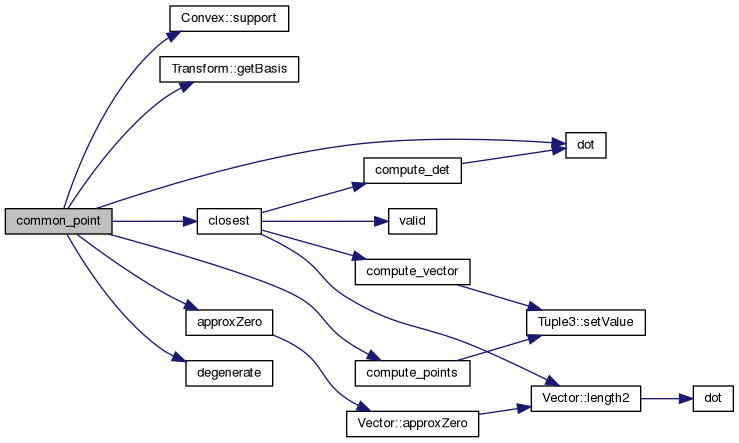
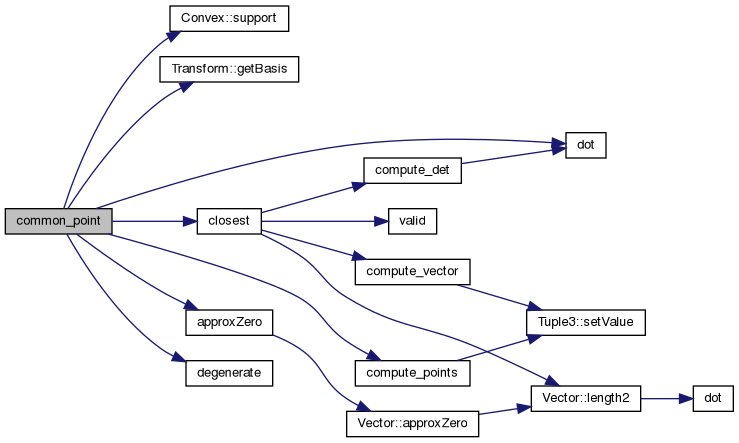
| bool | common_point (const Convex &a, const Convex &b, const Transform &a2w, const Transform &b2w, Vector &v, Point &pa, Point &pb) |
| bool | common_point (const Convex &a, const Convex &b, const Transform &b2a, Vector &v, Point &pa, Point &pb) |
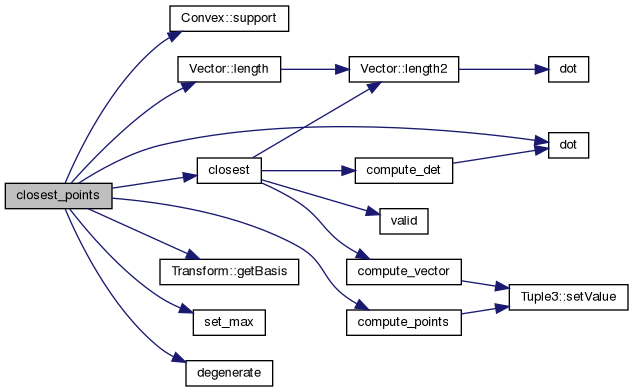
| void | closest_points (const Convex &, const Convex &, const Transform &, const Transform &, Point &, Point &) |
 1.8.14
1.8.14