|
TORCS
1.3.9
The Open Racing Car Simulator
|


|
|
TORCS
1.3.9
The Open Racing Car Simulator
|
|
#include "sim.h"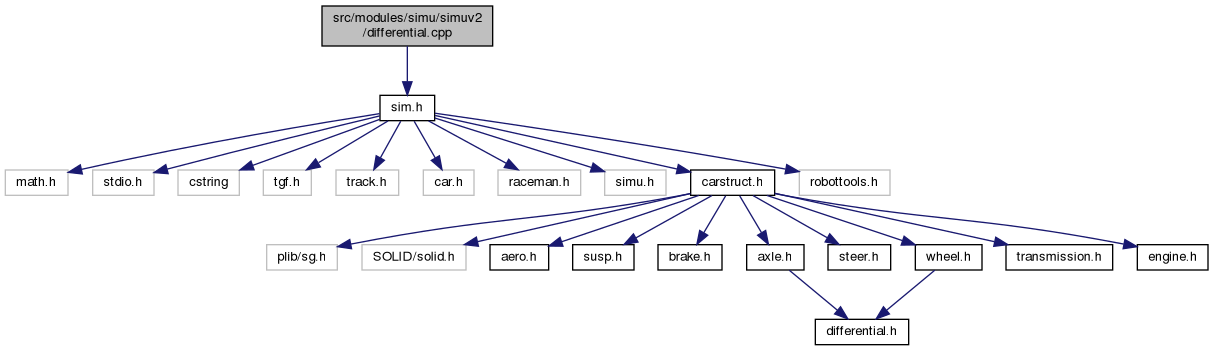
Go to the source code of this file.
Functions | |
| static tdble | applyBrakeToSpinVel (tdble spinVel, tdble brkTq, tdble inertia) |
| Integrate wheel/axle brake torque for one simulation step. More... | |
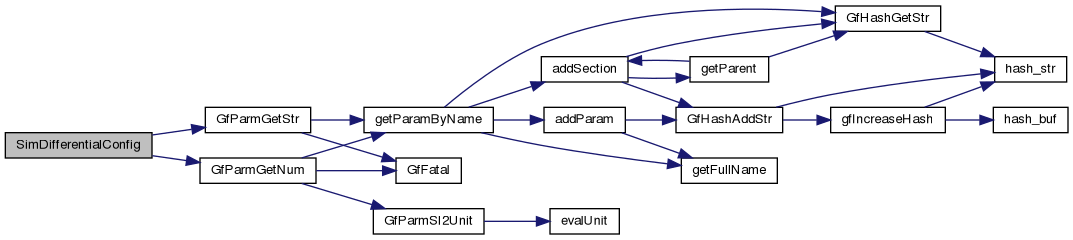
| void | SimDifferentialConfig (void *hdle, const char *section, tDifferential *differential) |
| void | SimDifferentialReConfig (tCar *car, int index) |
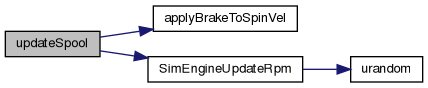
| static void | updateSpool (tCar *car, tDifferential *differential, int first) |
| void | SimDifferentialUpdate (tCar *car, tDifferential *differential, int first) |
Integrate wheel/axle brake torque for one simulation step.
This helper encapsulates the common brake integration logic used in both spool and split-differential update paths.
Behavior details preserved from the original inline code:
SIGN(spinVel)).SIGN(0) is positive), the step is suppressed to keep standstill.| [in] | spinVel | Current angular speed. |
| [in] | brkTq | Positive brake torque magnitude for this axis. |
| [in] | inertia | Effective rotational inertia used for integration. |
Definition at line 41 of file differential.cpp.
| void SimDifferentialConfig | ( | void * | hdle, |
| const char * | section, | ||
| tDifferential * | differential | ||
| ) |
| void SimDifferentialReConfig | ( | tCar * | car, |
| int | index | ||
| ) |
| void SimDifferentialUpdate | ( | tCar * | car, |
| tDifferential * | differential, | ||
| int | first | ||
| ) |
|
static |
 1.8.14
1.8.14