|
TORCS
1.3.9
The Open Racing Car Simulator
|


|
|
TORCS
1.3.9
The Open Racing Car Simulator
|
|
Common functions for robots. More...
#include <portability.h>#include <stdlib.h>#include <math.h>#include <tgf.h>#include <car.h>#include <track.h>#include <robottools.h>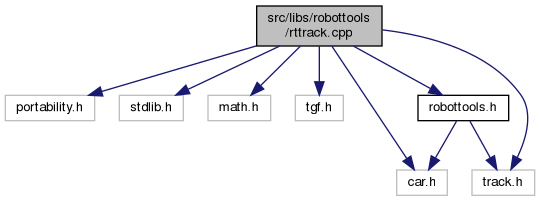
Go to the source code of this file.
Functions | |
| tdble | RtTrackGetWidth (tTrackSeg *seg, tdble toStart) |
| Get the track width at the specified point. More... | |
| void | RtTrackLocal2Global (tTrkLocPos *p, tdble *X, tdble *Y, int flag) |
| Calculate global coordinates from a local position relative to the given track segment (segment, toRight, toStart)The toStart position refers to the current segment, the function will not search for next segment if toStart is greater than the segment length. More... | |
| void | RtTrackGlobal2Local (tTrackSeg *segment, tdble X, tdble Y, tTrkLocPos *p, int type) |
| Convert a Global (segment, X, Y) position into a Local one (segment, toRight, toStart)The segment in the Global position is used to start the search of a good segment in term of toStart value. More... | |
| tdble | RtTrackHeightL (tTrkLocPos *p) |
| Returns the absolute height in meters of the road at the Local position p. More... | |
| tTrackSeg * | RtTrackGetSideNeighbourSeg (tTrackSeg *main, tTrackSeg *current, int tr_side) |
| Get the neighbour segment of the given current segment. More... | |
| tTrackSeg * | RtTrackGetSeg (tTrkLocPos *p) |
| Get the effective segment of the given position starting from a segment of type TR_MAIN, searching to the sides. More... | |
| tdble | RtTrackHeightG (tTrackSeg *seg, tdble X, tdble Y) |
| Returns the absolute height in meters of the road at the Global position (segment, X, Y) More... | |
| void | RtTrackSideNormalG (tTrackSeg *seg, tdble X, tdble Y, int side, t3Dd *norm) |
| Give the normal vector of the border of the track including the sides. More... | |
| tdble | RtTrackSideTgAngleL (tTrkLocPos *p) |
| Used to get the tangent angle for a track position The angle is given in radian. More... | |
| void | RtTrackSurfaceNormalL (tTrkLocPos *p, t3Dd *norm) |
| Used to get the normal vector of the road (pointing upward). More... | |
| tdble | RtGetDistFromStart (tCarElt *car) |
| Get the distance from the start lane. More... | |
| tdble | RtGetDistFromStart2 (tTrkLocPos *p) |
| Get the distance from the start lane. More... | |
| int | RtDistToPit (struct CarElt *car, tTrack *track, tdble *dL, tdble *dW) |
| Get the distance to the pit stop. More... | |
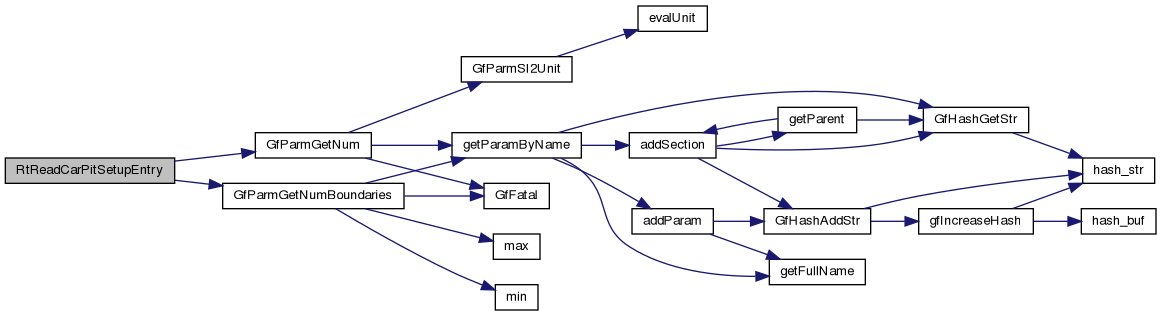
| static void | RtReadCarPitSetupEntry (tCarPitSetupValue *v, const char *path, const char *key, void *hdle, bool minmaxonly) |
| void | RtInitCarPitSetup (void *hdle, tCarPitSetup *s, bool minmaxonly) |
| Initialize tCarPitSetup from data in parameter set given in handle hdle. More... | |
| void | RtGetCarPitSetupFilename (rtCarPitSetupType type, int robidx, const char *carname, const char *trackname, char *filename, const int len) |
| Compose filename from given strings. More... | |
| static void | RtParmSetNum (void *hdlesetup, const char *path, const char *key, const char *unit, tCarPitSetupValue *v) |
| Robottool internal: Set parameter if min != max, save as well min and max values More... | |
| void | RtSaveCarPitSetupFile (void *hdlecar, tCarPitSetup *s, const char *filepath, const char *carname) |
| Save a custom car setup to a given filename. More... | |
| void | RtSaveCarPitSetup (void *hdlecar, tCarPitSetup *s, rtCarPitSetupType type, const char *modulename, int robidx, const char *trackname, const char *carname) |
| Save a custom car setup for a given robot, car, track and session (race, practice, qualifying, ...) type. More... | |
| bool | RtCarPitSetupExists (rtCarPitSetupType type, const char *modulename, int robidx, const char *trackname, const char *carname) |
| Checks if a specific car setup is available. More... | |
| bool | RtLoadCarPitSetupFilename (void *hdlecar, const char *filepath, tCarPitSetup *s, bool minmaxonly) |
| Load a custom car setup from a given filename. More... | |
| bool | RtLoadCarPitSetup (void *hdlecar, tCarPitSetup *s, rtCarPitSetupType type, const char *modulename, int robidx, const char *trackname, const char *carname, bool minmaxonly) |
| Load a custom car setup for a given robot, car, track and session (race, practice, qualifying, ...) type. More... | |
| void * | RtLoadOriginalCarSettings (const char *carname) |
| Gets a handle to a parameter file containing the original TORCS car setup, that means the car setup merged with the cars category setup. More... | |
| bool | RtInitCarPitSetupFromDefault (tCarPitSetup *s, const char *carname) |
| Initialize the given tCarPitSetup with the original TORCS setup, that means the car setup merged with the cars category setup. More... | |
| void * | RtParmReadSetup (rtCarPitSetupType type, const char *modulename, int robidx, const char *trackname, const char *carname) |
| Load a custom car setup file for a given robot, car, track and session (race, practice, qualifying, ...) type. More... | |
Variables | |
| static const char * | CarPitSetupFilenames [6] = { "practice", "qualifying", "race", "backup1", "backup2", "backup3" } |
| Array with names for rtCarPitSetupType enumeration. More... | |
Common functions for robots.
Definition in file rttrack.cpp.
|
static |
|
static |
Array with names for rtCarPitSetupType enumeration.
Definition at line 801 of file rttrack.cpp.
 1.8.14
1.8.14